Mobility criteria : Grueblers equation for mechanism design
 Mufaddal Rasheed
Mufaddal Rasheed 
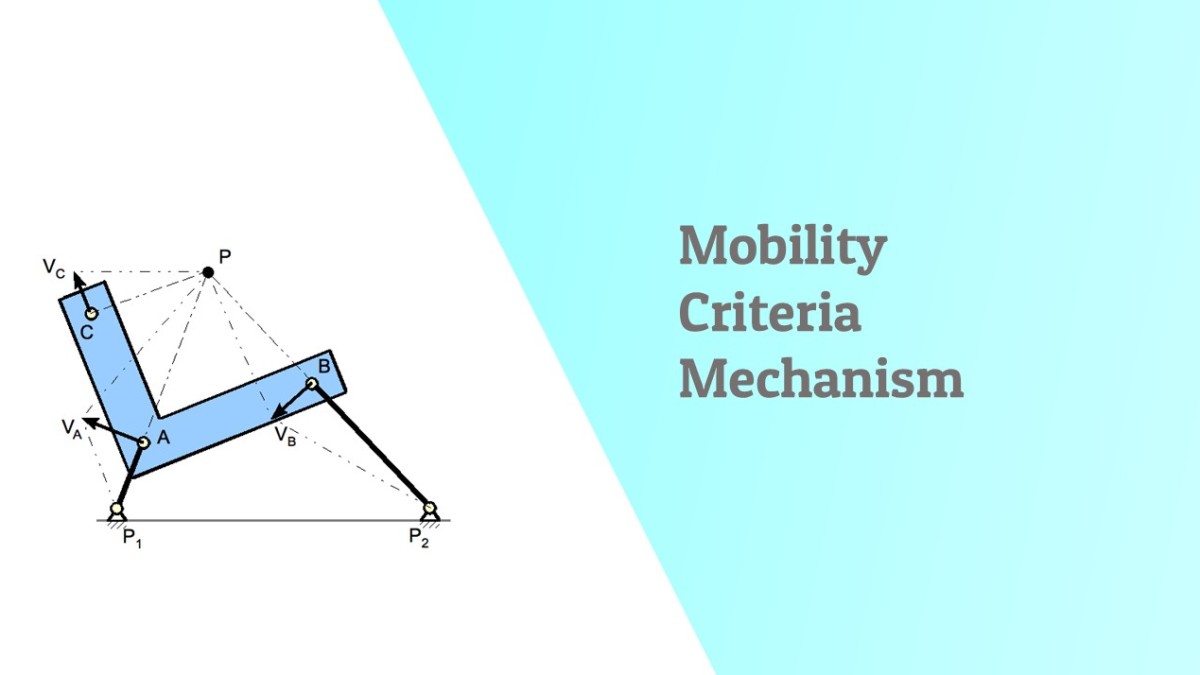
What is the Gruebler's mobility criteria in mechanical design and how to use it to design systems
Gruebler’s equation is commonly used to calculate the mobility of planar mechanisms. It is expressed as:
M = 3(N-1) – 2J-H
Where,
M - mobility of mechanism (degrees of freedom)
N - number of links
J - Number of lower pairs
H - Number of higher pairs
Lower pairs are revolute joints, prismatic joints which have one degree of freedom
Higher pairs are Cams, Rollers, Gears. Considered to have 2 degrees of freedom
More about kinematic pairs here.
Lets talk example of a Robot arm which operates in 2D
These are the Free links

When they are joined and one link is fixed, they will look like this

No. links, N= 4
No. of revolute pairs, J = 3
No. higher pairs, H= 0
Mobility criteria ; M = 3(N-1) – 2J-H
M = 3(4-1) -2 (3)- 0
M = 3
It means that the arrangement will require 3 degrees of freedom for definite motion which are nothing but rotations of each link in XY plane.
Applying the criteria on other arrangements:
4 bar mechanism

No of links = 4
No of revolute pairs = 4
No of higher pairs = 0
Mobility = 3(4-1) – 2(4) – 0
Mobility, M = 1
Which means only one degree of freedom, which is rotation of input crank are required for definite motion.
Slider crank mechanism :

No of links = 4
No of revolute pairs = 3
No of prismatic pairs = 1
Total kinematic lower pairs with 1 dof = 4
No of higher pairs = 0
Mobility = 3(4-1) – 2(4) – 0 = 1
1 input is required for definite position of the other links
Definition of a structure from mobility criteria :

No of links = 3
No of revolute pairs = 3
No of higher pairs = 0
Mobility = 3(3-1) – 2(3) – 0
Mobility equal to or less than zero means that this arrangement will not move when an input force is given on any of the links which basically means this is a structure.
Mobility criteria is critical in design of new mechanism to identify the mobility of the system and whether or not it will have definite motion with the input provided.
There are exceptions to this criteria though.
Categories: : Mechanism and Machine design
