Planar and Spatial mechanisms
 Mufaddal Rasheed
Mufaddal Rasheed 
What are the major differences between partial and spatial mechanism in mechanical design engineering?
Mechanisms are the backbone of engineering systems, transferring motion and forces to perform specific tasks. Two fundamental types of mechanisms, planar and spatial, play distinct roles in mechanical design and engineering. In this post, we’ll explore their differences, characteristics, and applications.
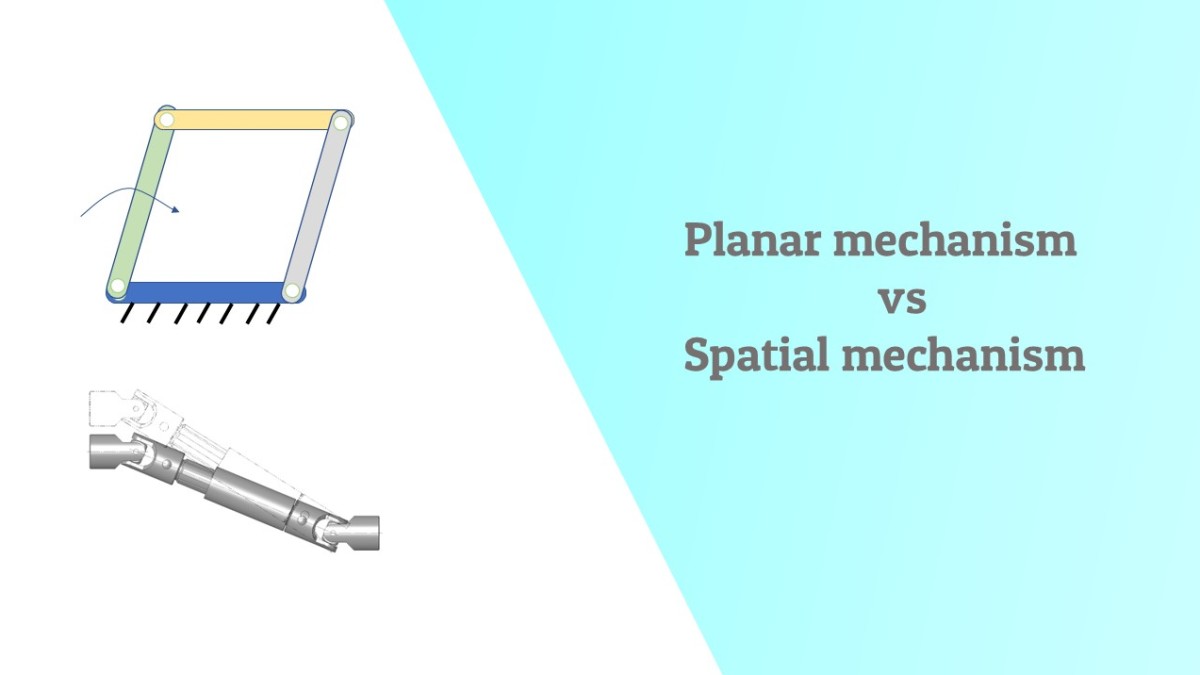
What Are Planar Mechanisms?
Planar mechanisms are systems where all the components move in parallel planes. The motion of links and joints occurs within a two-dimensional (2D) plane, making them simpler to design and analyse.
- The mechanism performs 2D motion and all points on the mechanism remain on the same plane
- Easier to analyse and synthesize
- Mostly utilize revolute and prismatic joints. To learn about kinematic joints click here.
- Simpler to manufacture and assemble
- Common in systems requiring motion constrained to a plane, such as packaging machines, automotive suspensions, and linkages in cranes


IC engine Piston + Connecting rod+ crank shaft constitute a Planar mechanism

Fixture clamps are 4 bar mechanisms which work on a single plane
What Are Spatial Mechanisms?
Spatial mechanisms involve three-dimensional (3D) motion, where the links move in different planes and orientations. These mechanisms are more complex but offer greater flexibility in movement.
- These mechanisms perform motion in 3D. Points on the mechanism may not be on the same plane
- Requires advanced mathematical tools and software for analysis.
- Types of joints includes spherical, helical, and universal joints, in addition to revolute and prismatic joints.
- Is much more costlier to manufacture as it requires more precision in manufacturing and also assembly can be difficult.
Examples of Spatial mechanism :
- Gimbals systems in camera
- Universal joints in cars
- Widely used in robotics, aerospace, and automotive industries for complex tasks like assembly, manipulation, and navigation.

Universal joint : A spatial mechanism

Camera gimbal
All mechanisms are actual spatial mechanisms
- One big assumption in analysis of planar mechanism is that all the links are co planar .
- But in reality, this is not possibility. There will be deviation in parallelism between links and points will eventually take 3D curves in space.
- Hence a planar mechanism In theory is actually , a spatial mechanism in practice. But we choose to consider these deviations as negligible in analysis.
- This consideration is to be taken very carefully in new design especially when dealing with joints and links which may be Elasto-kinematic as opposed to being only rigid kinematic.
Categories: : Mechanism and Machine design